Overview
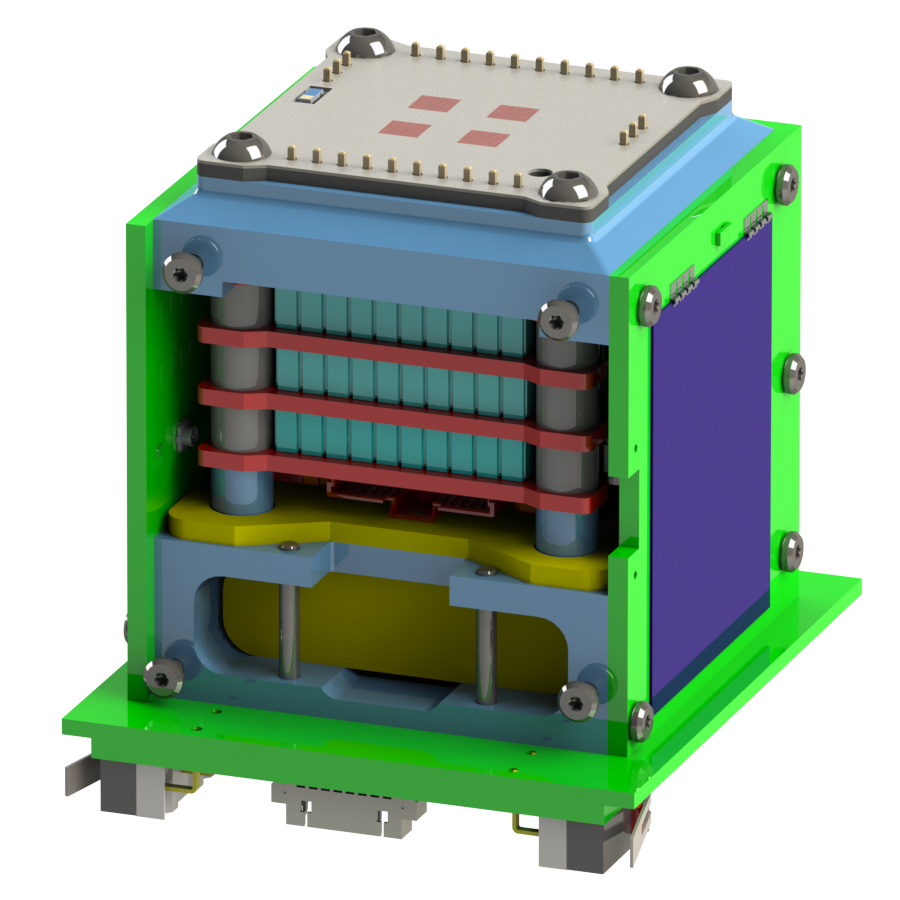
PoCAT-Lektron is a PocketQube mission selected for the European Space Agency's Fly Your Satellite! 4 programme, developed at UPC NanoSat Lab. The mission deploys two 1P PocketQubes (50×50×50 mm) carrying K-band and L-band passive radiometers to monitor radio-frequency interference, collecting RFI data that helps characterise interference affecting atmospheric water-vapour measurements and navigation signals. My role is the Attitude Determination & Control System (ADCS), responsible for stabilising both spacecraft after deployment and pointing them toward their science targets.
What I built
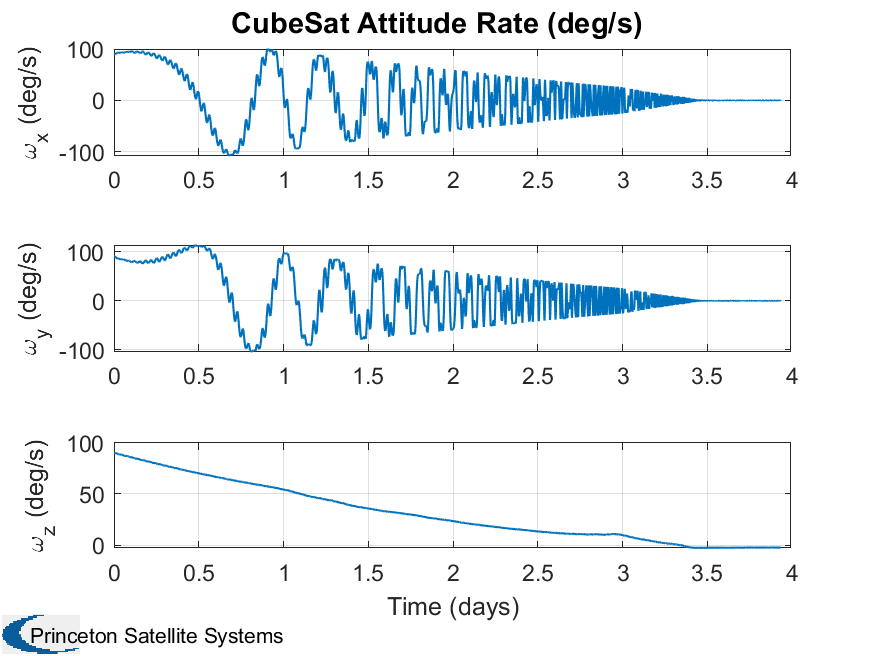
Passive detumbling with hysteresis rods
The first iteration of the ADCS used hysteresis rods to passively dissipate the angular momentum the satellite picks up during deployment. The ESA advisors set a detumbling requirement of an initial angular rate of 90°/s for the spacecraft. I modelled the rods, ran detumbling simulations, and characterised the convergence time across the expected initial-tipoff envelope.
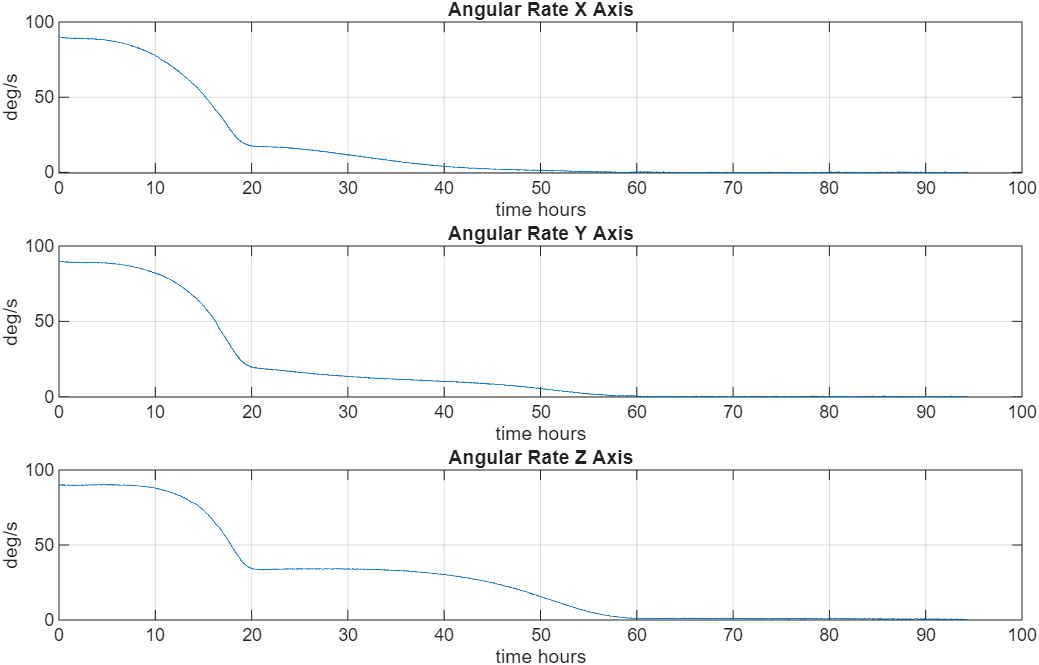
Active magnetorquer control
The design was later upgraded to active control: three-axis magnetorquers driven by an H-bridge actuation stage, with control laws targeting both detumbling and nadir-pointing. Attitude dynamics, magnetic-field models, and actuator saturation were simulated end-to-end in MATLAB.
Highlights
- Three-axis attitude dynamics simulation with realistic sensor noise and actuator saturation.
- Comparison of hysteresis-rod detumbling vs. active magnetorquer control across mission scenarios.
- H-bridge actuation logic for closed-loop torque control.
- Nadir-pointing controller validated in simulation against pointing-accuracy requirements.